Honeybee Robotics - Exploration Robotics for Extreme Environments
Summer 2018 - Software & Electrical Engineering Intern @ Honeybee Robotics
Provided ongoing project support & feature development for an in-house robotic control & testing framework built off of ROS, for projects including:
Projects
- NASA Europa Lander - Deep drilling & sampling system
- NASA/Honeybee Robotics Venus Drill - Enabling sampling of the Venusian surface
- NASA/Honeybee Robotics PlanetVac - Suction-based regolith sampling system
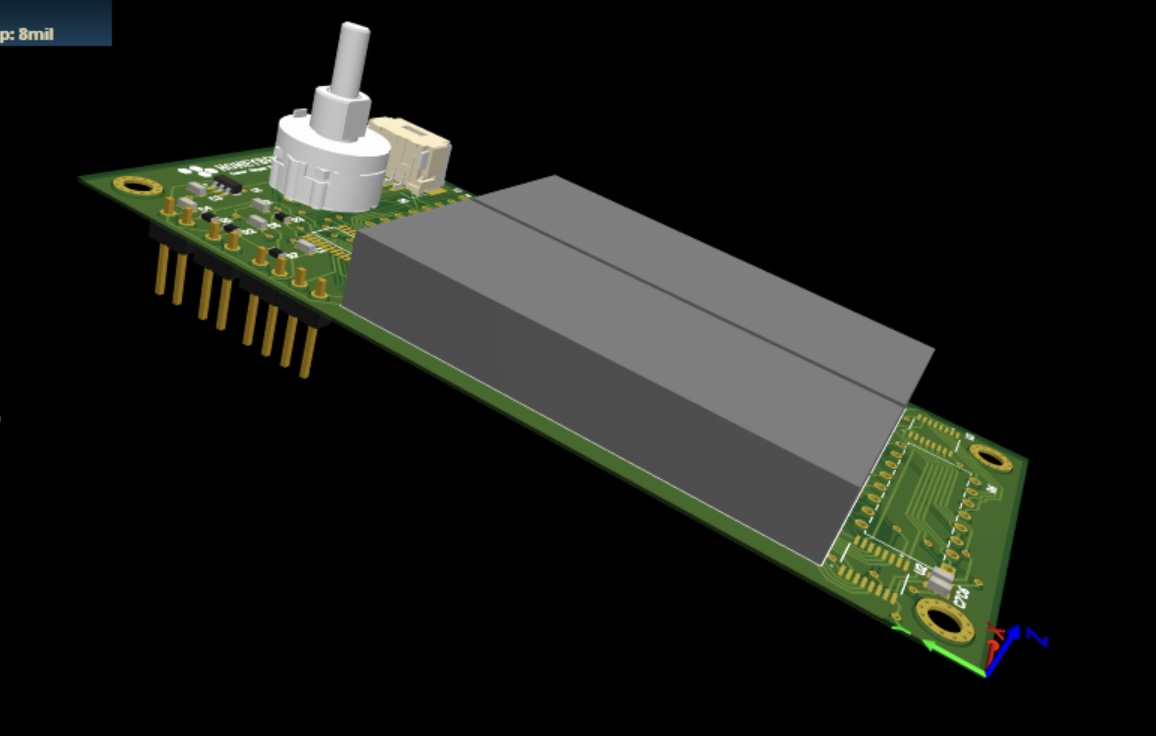
I also designed, implemented, and fabricated a board for human-operated stepper motor control, for use in exploratory terrestrial drilling sites, as part of the IMDEX Lab-at-rig system.
Takeaways
- Absorbed a highly creative approach to sensor design & use
- Gained fluency in ROS & pub-sub networking
- Gained experience in digital & analog design + board layout with Altium
- Gained experience in software & hardware-based motor control