PenPal: Vision-Guided Conversational Writing Robot
Authors: Conor Hayes, Amber Handal, Kyuwon Weon, Tianhao Zhang
Project Overview
PenPal is a vision-guided robotic system that can hold a written conversation. To do so, it detects a whiteboard in the environment, reads and generates answers to handwritten questions on the board using the Gemini vision-language model, and physically writes responses back onto the board using a Franka Emika arm.
The system integrates:
- Computer vision (AprilTag-based pose estimation, OpenCV preprocessing)
- Vision-language models (Gemini VLM for OCR + question answering)
- Robot motion planning (MoveIt Cartesian path planning)
- Frame-consistent spatial reasoning (TF trees and rigid-body transforms)
- Text rendering in arbitrary fonts, projected onto arbitrarily positioned planes in 3D space (custom-built in numpy + fontTools)
All perception, reasoning, and motion are performed dynamically at runtime, allowing the robot to adapt to changes in board position and orientation as they occur, such that the board can even be held by a human user as the robot writes.
System Architecture
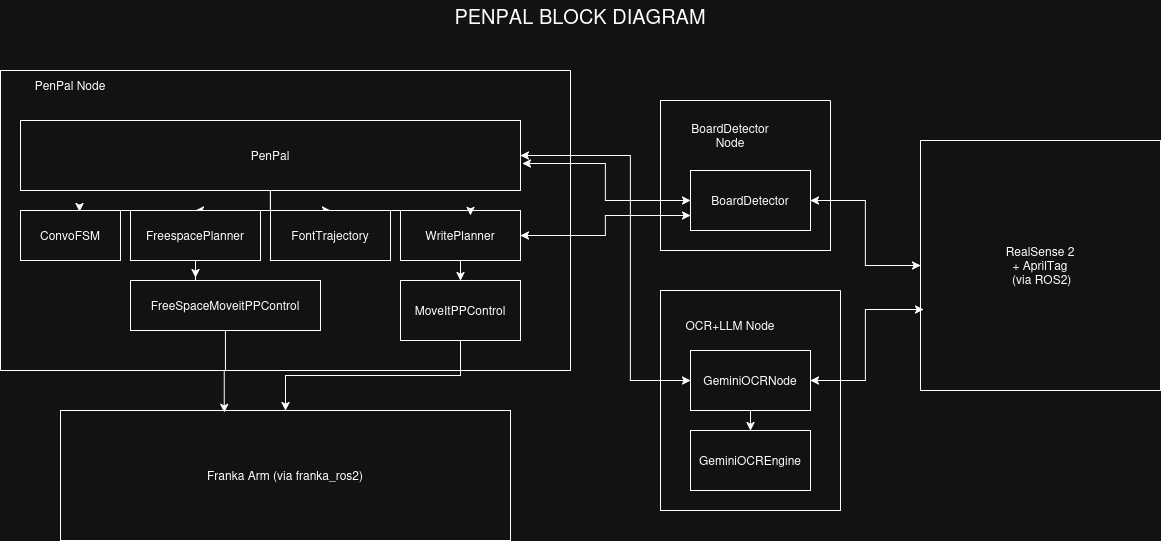
Nodes
penpal.pyTop-level orchestrator + FSM. Watches for board visibility, triggers OCR/VLM via a Trigger service client, and sends generated text to the writing stack (planner + controller). Provides wake, sleep, grab_pen services and write_message action. Subscribes to board_info.board_detector.pyReal board detector. Consumes AprilTag detections and produces penpal_interfaces/BoardInfo (board_info) containing board pose, dimensions, writable area, and detection metadata (e.g., tag count, sequence number).ocr_node.pyReal OCR + QA node. Provides read_and_answer_board (example_interfaces/Trigger) which captures/uses the latest image and returns a JSON payload containing transcription + a concise answer (and raw debug fields).mock_board_detector.pyPublishes a fixed/synthetic board_info for development when the camera/AprilTags aren’t running (useful for testing planning/writing).mock_ocr_node.pyMock Trigger-service implementation of OCR/QA. Always returns a static JSON payload for end-to-end testing of PenPal without VLM dependencies.
My Contributions
- Led team of 4; project-managed & coordinated team effort to meet deadlines
- Designed system architecture and managed system integration, ensuring individual work came together into a working system
- Implemented
PenPaltop-level control node which integrates all system components, enabling the robot to perceive, reason, and write in a closed loop at runtime, as well as its compomentsConvoFSMandFreespacePlanner. - Implemented
WritePlanner, which chunks and projects 2D text trajectories onto the 3D board plane as it moves in real-time. - Assisted Kyuwon with implementing
MoveItPPControl, which sits belowWritePlannerand executes its generated end-effector trajectories on the Franka arm using MoveIt.